 The four robots all fitting in the starting block
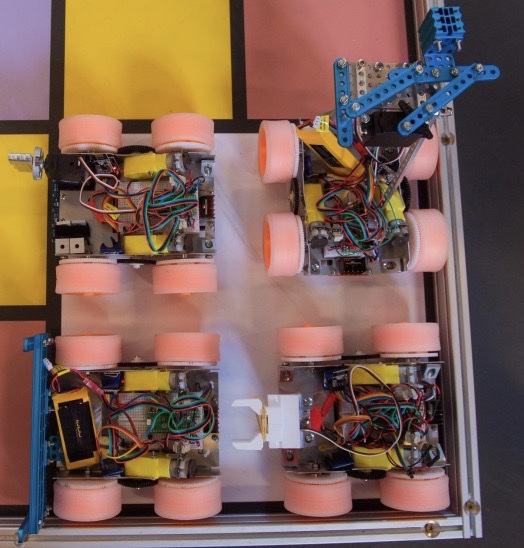
The four robots all fitting in the starting blockWhereas most people make one (sometimes two) robots for MIT's annual competition, I decided to make four. They all function autonomously and cooperate to share the game board's space.
They are programmed in C++ using the PlatformIO SDK. Implemented is a control state machine (sensor input, driving motors and wireless communications) and a dozen wrappers around peripherals (so that everything has a clean object-oriented interface).
The four robots all fitting in the starting block
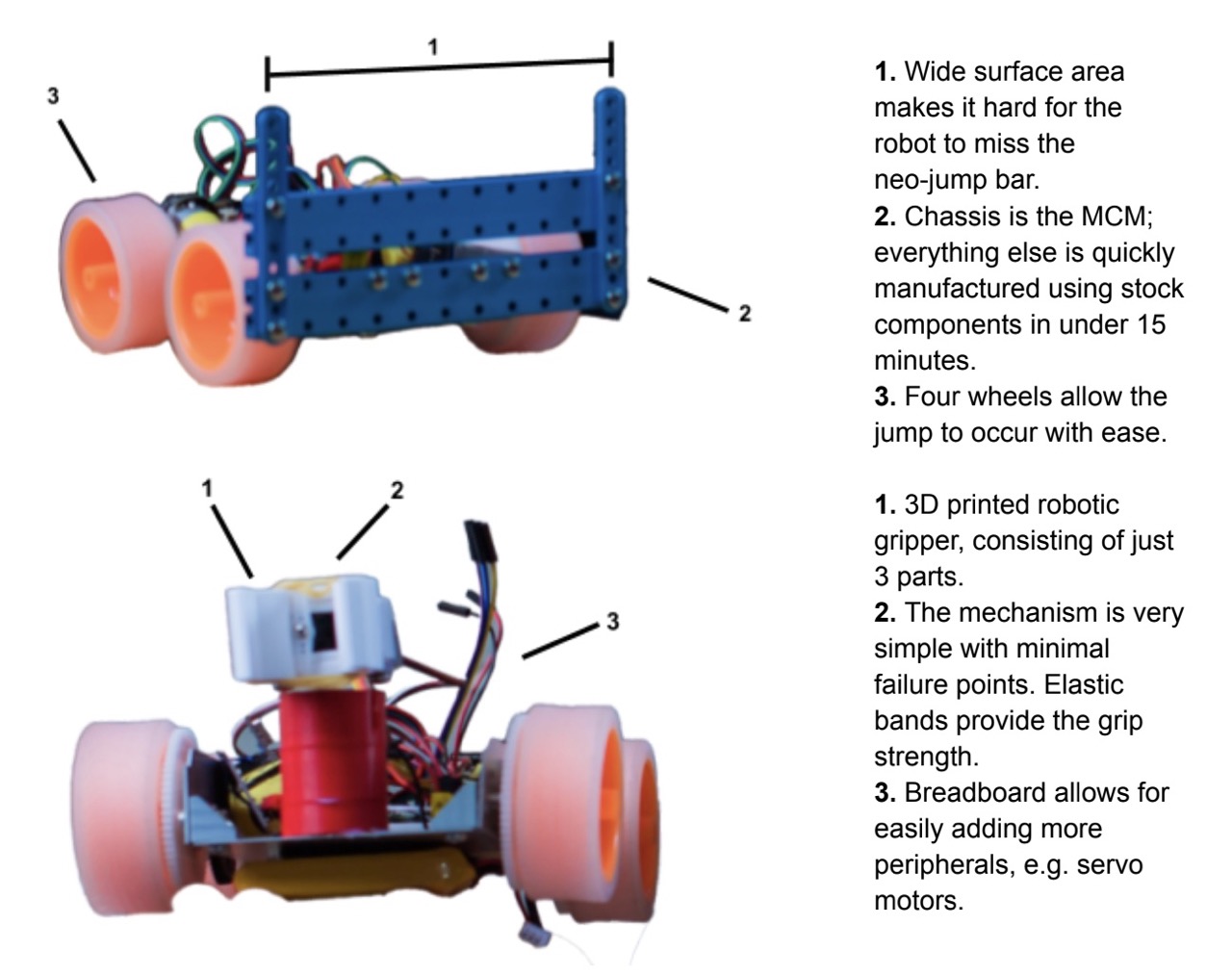 Some specialized features of two of the robots
Some specialized features of two of the robots
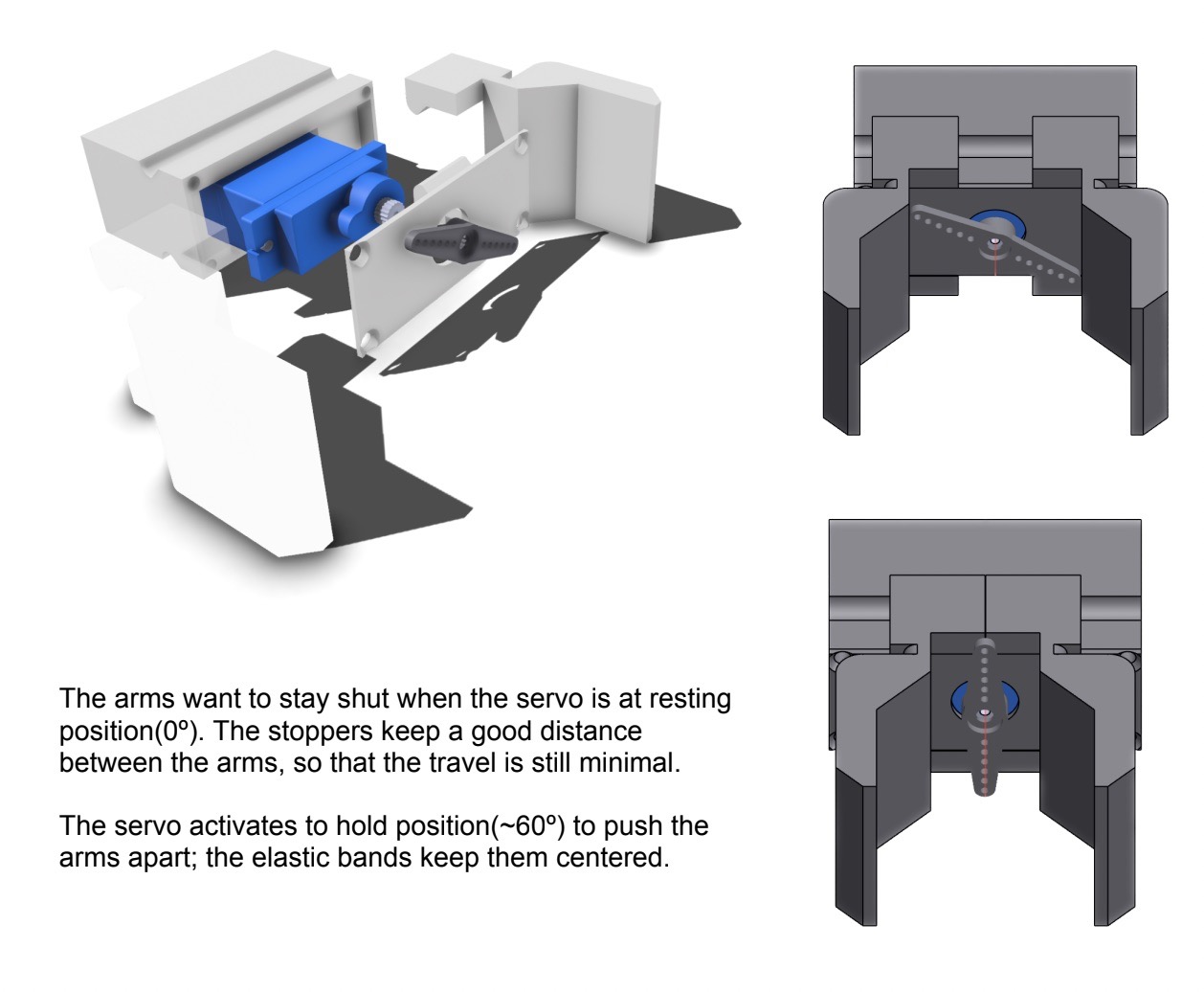 Overview of the gripper design for robot #3
Overview of the gripper design for robot #3